
Stefano Mazzoleni
Coordinatore Laboratorio di Bioingegneria della Riabilitazione,
Istituto di BioRobotica, Scuola Superiore Sant’Anna – Pisa.
Nelle società industrializzate diversi fattori concorrono a determinare una sempre maggiore necessità di prestazioni riabilitative a completamento e supporto degli interventi medici di tipo chirurgico e farmacologico. I principali di essi sono la crescente longevità della popolazione, l’esigenza di ridurre i tempi di degenza ospedaliera, l’introduzione di terapie che permettono di trattare patologie progressive altamente invalidanti, l’incremento di incidenza di disabilità gravi derivante dall’aumento di attività a rischio di incidenti e traumi, l’utilizzo di tecniche avanzate di rianimazione.
La necessità di una terapia riabilitativa appropriata ha una sempre maggiore rilevanza in molte patologie di origine neurologica: in questo caso si parla più specificamente di neuroriabilitazione.
Milioni di persone nel mondo soffrono di disordini motori legati a problemi neurologici, tra i quali i principali sono:
- Ictus
- Traumi cranici
- Lesioni del midollo spinale
- Sclerosi multipla
- Morbo di Parkinson
L’impiego di macchine robotiche per la neuroriabilitazione, che si affiancano alle terapie riabilitative tradizionali, si ispira a evidenze scientifiche che dimostrano come, a partire dal livello cellulare, le connessioni tra i neuroni (le cellule che formano il sistema nervoso) subiscano continue modifiche in risposta a eventi di varia natura, inclusi gli stimoli ambientali e danni a seguito di malattie o traumi.
A partire dagli anni ’90 alcuni gruppi di ricerca hanno sviluppato sistemi robotici per la riabilitazione, in grado di permettere al paziente di effettuare movimenti ripetitivi che consentono di realizzare un addestramento sicuro ed intensivo che può essere effettuato in associazione ad altri tipi di trattamento, appropriato a ciascun livello di abilità motorie residue, potenzialmente in grado di migliorare in maniera significativa gli esiti della terapia riabilitativa, di permetterne una valutazione oggettiva e di migliorare la pianificazione e l’utilizzo delle risorse sanitarie.
Nella fase riabilitativa assistita dal robot, il ruolo del paziente è assolutamente centrale: il robot accompagna, ed eventualmente completa, il movimento eseguito dal paziente in base alle sue capacità motorie residue (strategia di controllo denominata “assisted-asneeded”) e consente di ricevere molteplici stimoli (propriocettivi, visivi, uditivi, …) e spinte motivazionali.
Il paziente affetto da patologie neurologiche può svolgere la terapia di riabilitazione con l’ausilio di un sistema robotico (vedi Box 1).
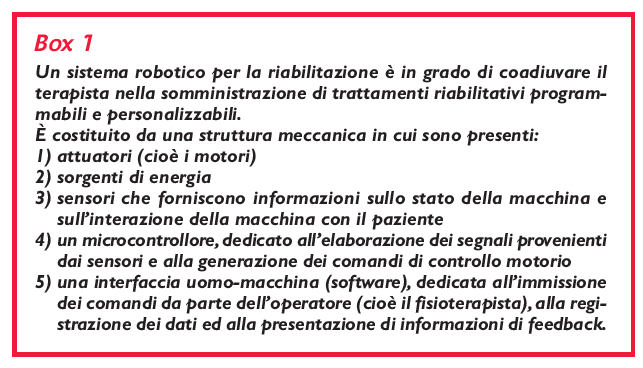
Durante la terapia riabilitativa il robot è in grado di misurare una serie di parametri di interesse clinico mediante dei sensori e di permettere così allo staff medico di avere una valutazione oggettiva del recupero funzionale. Questa valutazione è molto più accurata di quanto non sia possibile ottenere con i metodi tradizionali. Inoltre, la macchina può consentire al terapista di programmare e di far eseguire al paziente una vasta gamma di movimenti utili per la riabilitazione dell’arto.
I sistemi robotici per la riabilitazione possono essere classificati in due grandi famiglie in base al tipo di interfaccia meccanica tra il paziente e la macchina stessa:
- macchine riabilitative a esoscheletro ;
- macchine riabilitative a effettore finale (vedi Box 2).
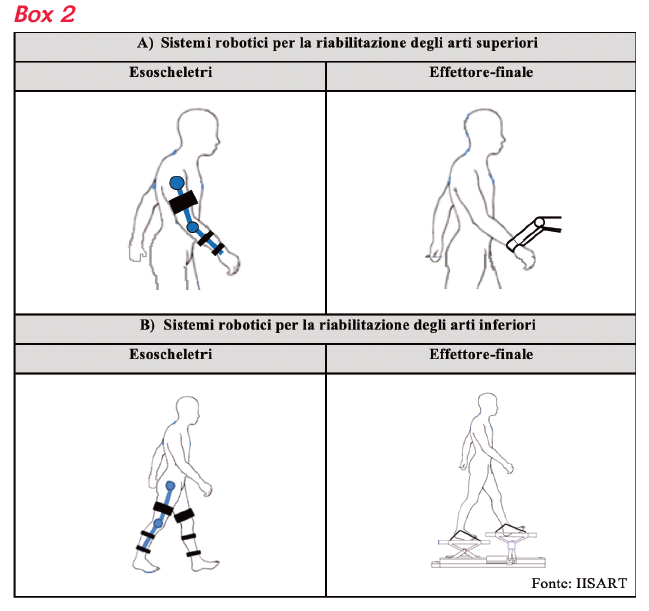
Nel primo caso, l’interfaccia uomomacchina è estesa a tutto l’arto (o alla parte di esso) di interesse clinico; nel secondo caso, il contatto tra la struttura meccanica e il paziente è limitato alla parte finale dell’arto (mano o piede) che è collegata alla struttura meccanica mediante una maniglia o un pedale.
L’applicazione di macchine nella riabilitazione soffre ancora di alcune limitazioni tecniche e funzionali; il suo reale vantaggio in campo clinico è stato dimostrato solo parzialmente.
Vi sono tuttavia solidi argomenti che incoraggiano i ricercatori a sviluppare nuovi sistemi robotici per la riabilitazione che traggano diretto vantaggio dal progresso scientifico e tecnologico nel campo della robotica e delle neuroscienze.
Il potenziale clinico di questi robot è notevole, in quanto essi possono, da un lato, coadiuvare il terapista nel somministrare la terapia riabilitativa ritenuta più adeguata a ogni singolo paziente con un’alta precisione e ripetibilità, caratteristiche dei sistemi robotici e, dall’altro, permettere di acquisire informazioni quantitative sui movimenti effettuati dal paziente stesso durante la terapia.
Tali macchine possono inoltre permettere al paziente di svolgere sedute riabilitative in modo semiautonomo, in linea di principio anche dalla propria abitazione, con un notevole vantaggio in termini di migliore qualità di vita e riduzione delle spese sanitarie.
L’innovazione tecnologica nella robotica ha permesso di sviluppare dispositivi per riabilitazione con un notevole impatto potenziale.
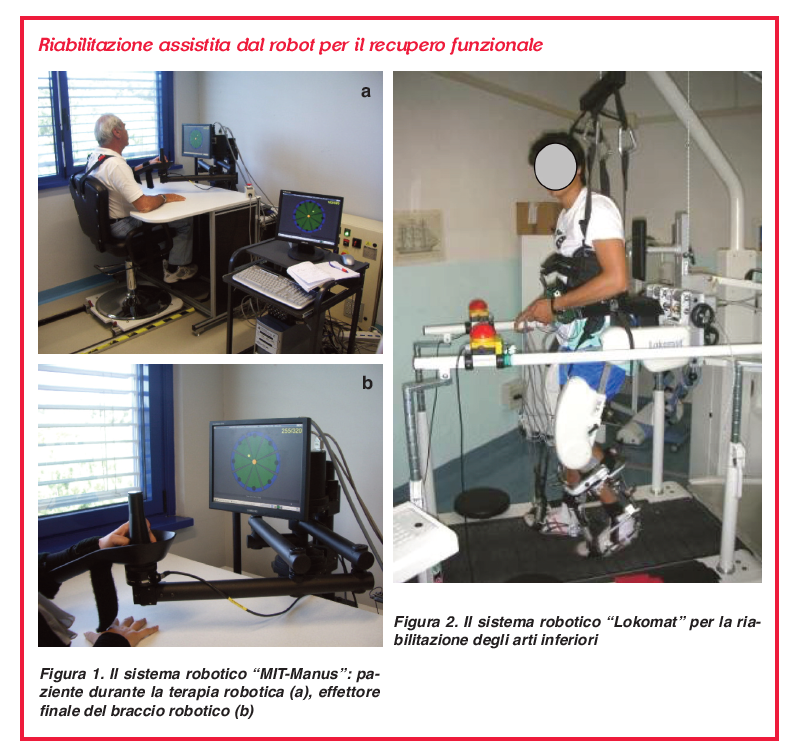
I sistemi robotici possono essere utilizzati per la riabilitazione e il recupero funzionale degli arti superiori (Figura 1) e degli arti inferiori per il recupero del cammino (Figura 2).
Le evidenze scientifiche disponibili finora dimostrano che l’utilizzo dei sistemi robotici per la riabilitazione può contribuire alla riduzione del danno motorio e al miglioramento di alcune caratteristiche del movimento, sebbene sia necessario approfondire quali siano le modalità ottimali (in termini di durata, frequenza, tipologia di assistenza) per ciascuna patologia e per ciascun paziente con l’obiettivo finale di identificare e implementare trattamenti riabilitativi di precisione e personalizzati.


